
This June, on a public road in Jeju, a car drove past and our AI flagged the potholes. Then a robot rolled out and filled them — no crew laying asphalt by hand. It was the first time we ran the full RovoRoad pipeline, detection through repair, on a real Jeju road. And it closed out our first year of work.
From the Lab to a Jeju Road
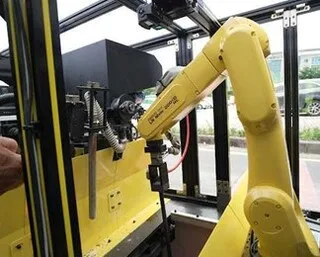
From June 21 to 25 we took the system onto public roads. A vehicle-mounted AI vision system reads the pavement as it drives, picking out potholes and cracks in real time. Then the unmanned repair robot moves in and fills the damage on its own — the whole detect-to-repair loop, running outside the lab.
Two things made it feel real. First, the material: instead of conventional asphalt concrete, we used a durable thermoplastic compound built to extend how long a repair lasts. Second, the conditions — we ran it in heavy rain, across two sites, and the robot still filled a four-centimeter pothole in about twelve minutes. Two survey vehicles covered roughly 250 kilometers between them. Officials from Jeju Province’s road-management side came out to watch it work.

A Year of Results
RovoRoad is joint research I lead as Principal Investigator, with Professor Jinwoo Lee at KAIST on robot control and Professor Kyugeun Yoon at Seoul National University on damage prediction and materials. RovoRoad — the company turning this into a product — is led by CEO Namho Kim.
The Jeju demonstration capped a strong Year 1. We hit our targets across the board: 91.23% prediction accuracy, 0.87 AP on pothole detection, 0.84 MIOU on segmentation, and a 55-minute repair cycle. Earlier demonstrations ran on the mainland; Jeju was the first on the island. If you want the fuller Year-1 story, I wrote it up after our results-sharing conference in February, and the project page has the overview.
What Year 2 Builds
On June 26 we held the Year-1 results report and Year-2 kickoff at Cheju Halla’s K-HighTech Center. The Year-2 plan is about completeness and scale: push accuracy and segmentation further into the 90s, bring the repair cycle under fifty minutes, and grow from two field demonstrations to ten. We’re also building a standalone detection terminal aimed squarely at the road-maintenance market.
The way I put it on the day: the goal isn’t just fixing potholes faster. It’s a data-based, preventive maintenance system — catching damage before it becomes a hazard, and raising both citizen safety and how efficiently roads get managed. Namho Kim framed the commercial side well: running lab-grade technology through Jeju’s varied roads is what moves it toward a real product, and toward a new standard for how roads get maintained.
Why This Matters
Jeju’s roads take a beating from weather and tourism traffic, which is exactly why they make such a good proving ground. If we can automate the detection-to-repair cycle here, it changes the economics of road maintenance anywhere. That’s the bet — and this month it drove out onto a real road. It was a fitting note for the same day’s Jeju Anchor industry-academia forum, where I spoke about where this kind of regional research goes next.